¿Qué es?
Fue mi proyecto de tesis para recibir mi título de ingeniero Mecatrónico en el año 2011.
El título es "Diseño, construcción y control de un robot hexápodo".
El simulador y controlador del robot lo hice en C# con XNA y menejaba el robot con un control de Xbox. El modelo lo hice en Blender.

Traslaciones
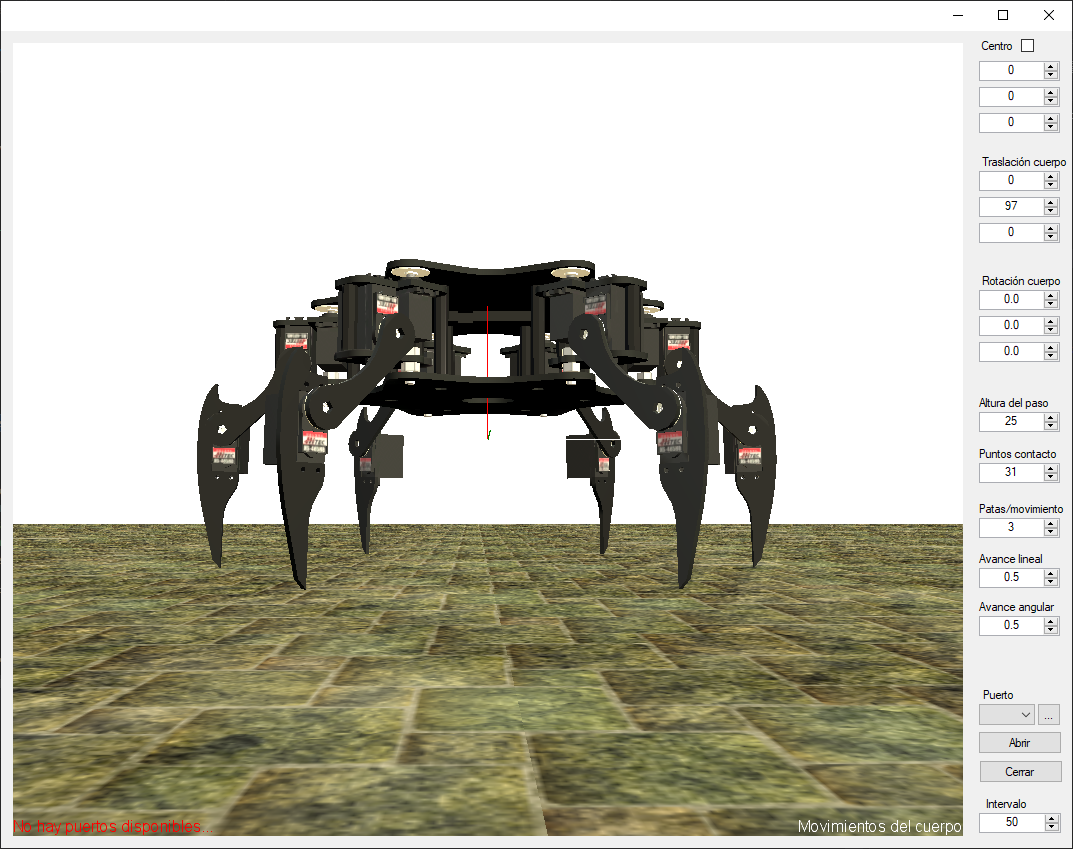
El cuerpo del robot se puede mover linealmente en cualquier dirección X, Y, Z instantáneamente en cualquier momento.
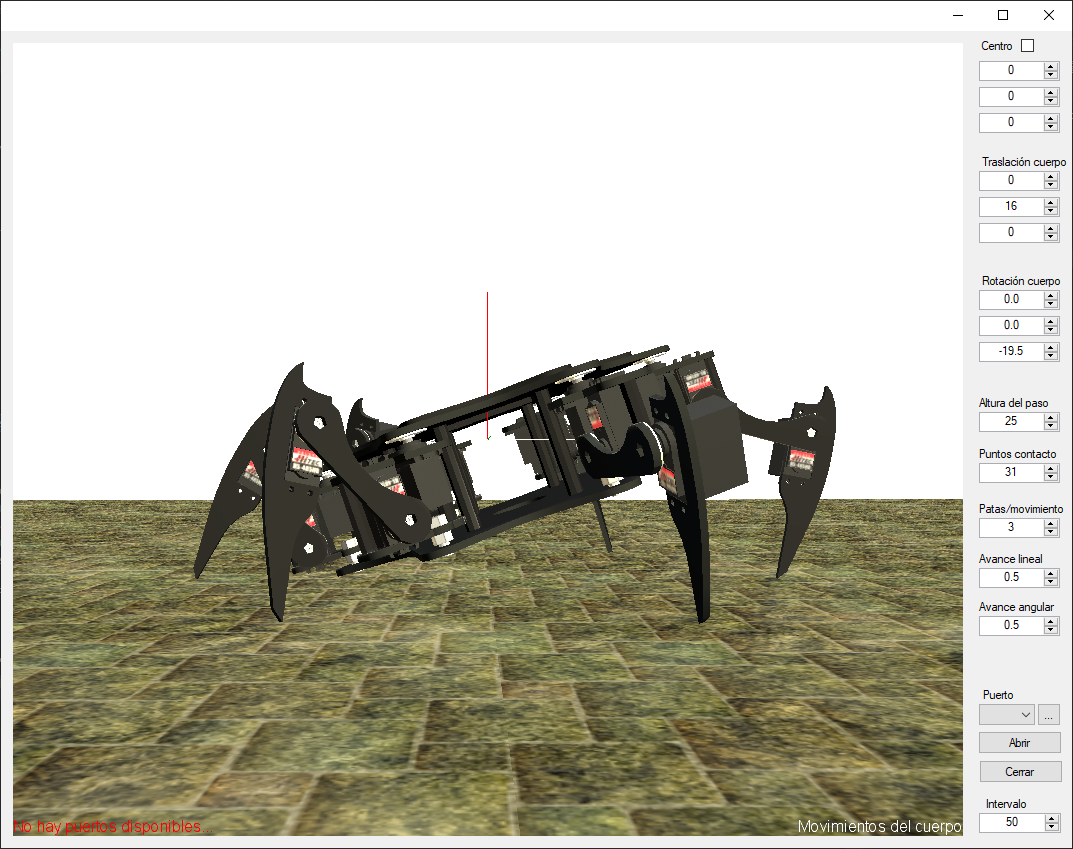
Rotaciones
El robot puede rotar su cuerpo en los ejes X, Y, Z instantánemente en cualquier momento.
Las rotaciones las puede hacer en torno a un centro que es configurable en el programa.
Traslaciones y rotaciones
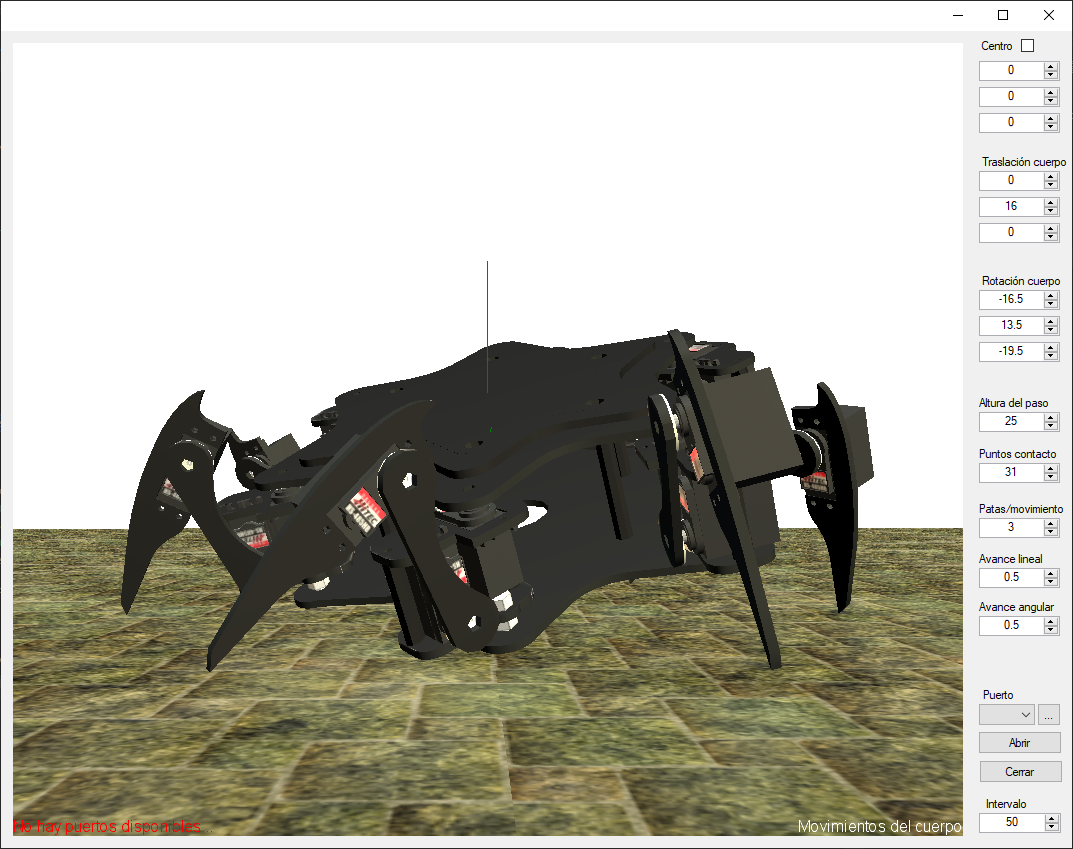
Los robots hexápodos tienen la capacidad de moverse omnidireccionalmente, esto es, que pueden trasladarse y rotar en cualquier dirección en cualquier momento.
Algunas combinaciones no son posibles por restricciones físicas de las piezas donde la cinemática inversa no tiene solución. Cuando el controlador encuentra estas posiciones el robot se queda con la última posición posible.
Además de los movimientos del cuerpo se desarrollaron diferentes tipos de marcha, 3, 2 y 1 pata a la vez. Todos estos tipos de marcha también cumplen con el movimiento omnidireccional.
Simulación
El robot simulado sirvió para resolver todos los problemas de control del robot antes de fabricarlo. No se construyó nada hasta que el simulador funcionaba por completo.
El robot fabricado es una copia fiel del simulado, por lo que al momento de su construcción no surgieron problemas y se comportó de la misma manera que en la simulación.

Electrónica

En la placa electrónica del robot utilicé un microcontrolador PIC18F452 para la recepción y análisis de datos y un PIC18F4550 para el control de los 18 servomotores.
Los datos que procesa y genera el simulador se envían inalámbricamente al robot con protocolo ZigBee.
Construcción
El robot tiene 6 patas y cada pata 3 servomotores Hitec HS-485HB.
Las piezas que componen el robot son de acrílico de 4mm y fueron cortadas con láser.
